

________________________________________________________________________________________________________________________________________________________________________________________






Initial tests with Ecoflex silicone and soft robotic structures with embedded pneumatic networks: These experiments were used as a foundation for understanding how to mix, colorize, cure and cast the Ecoflex as well as getting an overview of its material properties during inflation and deflation.









Integrating laser cut non-woven mesh with soft robotic structures: This was done to explore a recently introduced method of texture morphing in soft robotics. Texture morphing is a technique where non-woven mesh is integrated into soft silicone to constrain expansion at strategic points. Inspired by soft tissue organisms’ abilities to morph in shape, the non-woven mesh acts as a stabilizing fiber tissue (Pikul, Li, Bai, Hanlon, Cohen & Shepard 2017: 211). The integrated mesh is laser cut in specific patterns, which allows for more precise inflation patterns. Although Pikul et al.'s (2017) research was used as a foundation for the experiments, their directions and suggestions for fabrication were adapted and not precisely followed. The focus was to explore the aesthetic qualities of using this method over the fabrication model with pneumatic networks.
Homo Viridis is the outcome of a research practice of experimenting with soft robotics technology as a medium for wearable artworks. It has involved becoming familiar with the constituent materials (silicone, different fabrics, pressurized air etc.) and cultivating a formalized repertoire of techniques as well as an embodied knowledge of behaviors. In this section this cumulative process is documented and the methods of fabrication and the designs discovered are described.













Tests with laser cut felt in texture morphing soft robotic structures: During these tests it became clear that, although the felt worked well for making the actuators more rigid at the outer edges, this material would not be ideal for covering the moveable top surface. Firstly, the felt was very thick and needed a large amount of Ecoflex silicone for the covering. Secondly, the material was too rigid to allow for the cut-out air pockets to inflate properly. Instead, the Ecoflex would inflate on the inward-facing side, which was not the intention. The outcome of the tests did, however, suggest that the laser cut felt could be ideal as a base layer for stabilization in soft robotic wearable structures.
Furthermore, some of the materials used in these tests would rip or separate from the Ecoflex when the soft robots reached a certain level of inflation. The various tests with this particular method and the "material back talk" (Schön 1983, 1987) from these, indicated that moving towards working with simple forms and shapes in the fabric would allow for more complex visual aesthetics when inflated.







Various designs of soft robotic structures incorporating non-woven mesh and felt: Through multiple attempts, smaller pieces of both felt and Vlieseline sew-in interlining mesh was attached to the soft robotic actuators. Although the smaller pieces of fabric gave the soft structures an interesting visual aesthetic when they were not inflated, blowing air into the chambers did not change the shape and texture of the robots considerably. It became apparent that even if the integration of smaller pieces of fabric made the robots more visually complex, the complex patterns actually hindered the kinetic and dynamic expressiveness of the materials.






After gathering feedback at the exhibition of the first prototype of Homo Viridis, a new prototype was made in order to accommodate some of the feedback gathered from the participants. After learning that a majority of the participants felt that the mounting with felt and Velcro produced distance, an attempt to bring the soft robot as close as possible to the human body was carried out.
An idea occurred to test if skin safe Ecoflex could merge the organic skin with the synthetic skin without felt for stabilization and Velcro for tightening the soft robot. The wearable sleeve was placed on the underarm and Ecoflex was mixed and applied at the intersection between soft robotic skin and human skin with a brush. The test showed that using Ecoflex to fasten the sleeve to the skin had unforeseen qualities. Where, in the first tests, there was a visible border between the sleeve and the actual skin, applying transparent Ecoflex on the human skin made it appear as if the two layers had merged and the soft robotic skin was an integrated part of the body. Shortly after mounting the soft robotic skin, the synthetic layers reached body temperature, which enhanced the impression of the soft robot as a part of one’s body. The impressions from the experiment suggested that removing the layer of felt increased the sensitivity and sense of touch on the arm. Furthermore, the haptic experience of this prototype also differed from the other sleeve in that it almost felt as if the soft robot was pinching the underarm in unexpected ways.






























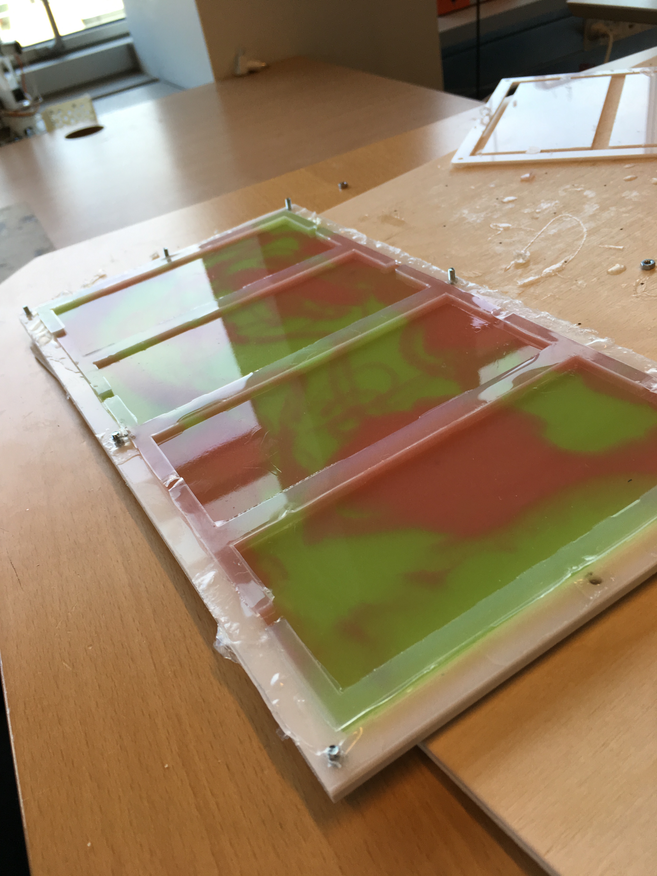
After constructing multiple smaller prototypes and testing suitable materials a more finished prototype of a wearable soft robotic sleeve was fabricated. Four individually controllable air chambers were cast into a single piece of Ecoflex silicone. This design was chosen to give an impression of the soft robot as a type of skin that was to extend the wearer's body.
During these tests, it was explored how Ecoflex in different colors could be mixed together to create different kinds of visual aesthetics. In the beginning of the process, the robots were limited to being single-colored. However, after trying to blend various colors together, we saw how this added complexity to the looks of the soft material. By mixing different colors together in a sort of collaged pattern, the appearance the robot also came to visually appear more organic and animate. The idea of using colors that can be found on or in the human body was introduced at this stage in the project. By alternating between transparent silicone and silicone with red, light pink, and black pigments, a marbled effect in the layers occurred which resembled soft organic tissue. Exploring the materiality of the surface as well as the coloring of the materials lent more complexity to the design while maintaining a simple overall shape and keeping dynamic air chambers on the inside of the robot.














The first prototype of the final design was attached to the arm by strings. After producing and testing the first prototype made in one piece with individual air chambers, it was apparent that this method created the opportunity for making a lifelike and expressive, texture morphing, pneumatic robot. The prototype also revealed that the soft robotic skin offered surprising visual and haptic qualities. Because the layer of non-woven mesh had been designed to give each individual air chamber a unique visual expression, the sensation on the arm also differed. The individual air chambers applied pressure differently and offer a multitude of different haptic sensations on the skin. This point possibly made the soft robotic skin appear more organic and lifelike. Although this prototype was functioning, the test suggested that a different method for fastening the robot to the underarm was needed for the interactive installation. It was decided to develop a more convenient solution than using strings,
Thus, for a second prototype similar to the first one, Velcro strips were sewed to the bottom felt layer (see last photo). This allowed for quick mounting and customization in terms of how loose or tight the sleeve needed to be. Furthermore, seeing the first prototype’s visual appearance when inflated led to a redesign of the pattern in the non-woven mesh. This was carried out to make a more coherent visual identity and to evenly distribute the haptic sensations on the underarm.




















After developing software for the Arduino that could control the soft robotic sleeve, based on input from the capacitive sensor and reaching a point where the concept and actual design of Homo Viridis could work as a functioning prototype, the whole setup was moved to a larger space to be exhibited (the exhibition is described in more detail on the next page 'Discussion & Reflections').



